Hi, I'm Saurabh H. Mirani
Proficient in
Self-driven, quick learner, passionate roboticist with a curious mind who loves solving complex, challenging real-world problems.
About
I am a passionate and dedicated robotics researcher with extensive experience in real-time motion planning, SLAM, and AI-driven solutions. My work spans cutting-edge research and industrial innovation, integrating technologies like high-dimensional real-time motion planning, deep learning, and real-time optimization to solve complex challenges in Robotics and AI.
Currently, as a Research Engineer at LG, I lead transformative projects, including designing patented navigation strategies that outperform industry benchmarks and leveraging AI for enhanced obstacle avoidance. My prior role at Flexiv Robotics allowed me to design dynamic motion planning frameworks, model predictive control, and middleware communication bridges, pushing the boundaries of real-time robotics performance.
My academic journey includes an M.S. in Intelligent Systems, Robotics, and Control from UC San Diego, where I conducted groundbreaking research on neural motion planners, achieving significant efficiency and accuracy gains. At IIT Kharagpur, I built a strong foundation in mechanical engineering, furthering my expertise in UAV motion planning and low-cost autonomous systems.
With a proven track record of innovation and a commitment to advancing robotics through research, I aim to contribute to solving pressing challenges in Robotics and AI.
Experience
- Spearheaded the migration from Finite State Machine (FSM) to Hierarchical State Machine (HSM), exploiting 60% of pre-existing states to eliminate redundancies, thereby reducing code duplication and improving modular scalability
- Engineered and patented a cutting-edge cleaning strategy for autonomous robot vacuum cleaners, outclassing competitors by increasing efficiency by 25% and setting a new industry standard
- Leveraged AI (object detection and pose estimation) to develop advanced obstacle avoidance, cutting collision incidents by 40% for small objects such as cables and toys, usually undetected by LIDAR, enhancing navigation efficiency
- Tools: C++, ROS

- Designed and implemented a variant of Dynamic Roadmaps, for real time motion planning under uncertainty, of a dual arm setup
- Implemented a real time path-following model predictive controller (MPC) using GRAMPC for continuous re-planning with Dynamic Roadmaps
- Developed and released a motion planning app consisting of optimization based motion planning algorithms like TrajOpt using OSQP, IFOPT, sampling based algorithms like RRT, RRT*, Descartes, and continuous collision detection algorithm using Bullet Physics thereby reducing the deployment time from weeks to hours
- Used the motion planning app for applications such as deburring, polishing, wire harness assembly, and bin picking
- Good understanding of CI/CD concepts, worked on writing docker files, improved the code coverage, involved in setting up jenkins and bitbucket pipelines and auto packaging for the motion planning app
- Experienced in working as part of an Agile Scrum team and used Jira for bug tracking and task management
- Tools: C++, ROS
- Developed MATLAB module for path planning of autonomous robotic arm of high-DOF like KUKA’s LBR iiwa
- Executed obstacle avoidance using Gilbert–Johnson–Keerthi (GJK) distance algorithm in parallel to RRT-star path planning to reduce the time complexity. The result was a refined path easily traceable by the robotic arm
- Tools: MATLAB, ROS

- Improvised the motion planning for time-optimal pick and place operation of a 6 DOF robotic manipulator
- Worked on the gripping method and stack management for teach and repeat type application of the robot
Projects
A computationally efficient, learning-based neural planner for solving motion planning problems
- Combined MPNet (neural planner) and Fastron (proxy collision detection) to improve accuracy and reduce planning time
- Used LibTorch in C++ for multi-objective optimization with joint limit, collision score and path length as objectives
- Reduced the computation time by 50% and improved the success rate from 85% to 99%
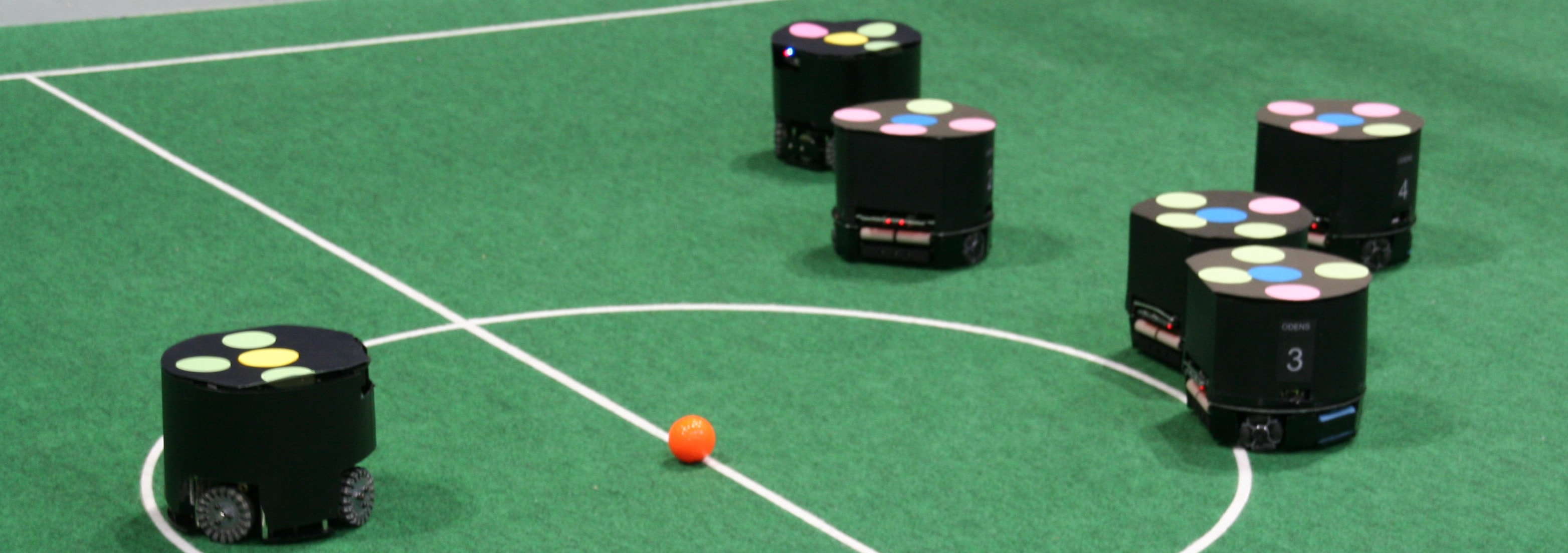
Soccer playing autonomous omni drive robots for RoboCup
- Tools: AVR & ARM, SolidWorks, MATLAB & Simulink, C++, Python, ROS
- Participated in 21st RoboCup, Japan (2017)
- Developed a fuzzy logic tuned robust PID controller for efficient control of brushless direct current motors
- Performed a comparative study on the variations of RRT, worked on path simplifier and velocity profiling of the path
- Conceptualized and designed the circuits based on AVR and ARM Micro-controllers and developed communication system for minimum data loss and maximum data transfer rate
- Developed a multi-threaded 3-tier Skills-Tactics-Plays architecture for controlling omni-directional robots using ROS
- Designed and optimized the dribbling and kicking mechanisms using SolidWorks and MATLAB & Simulink
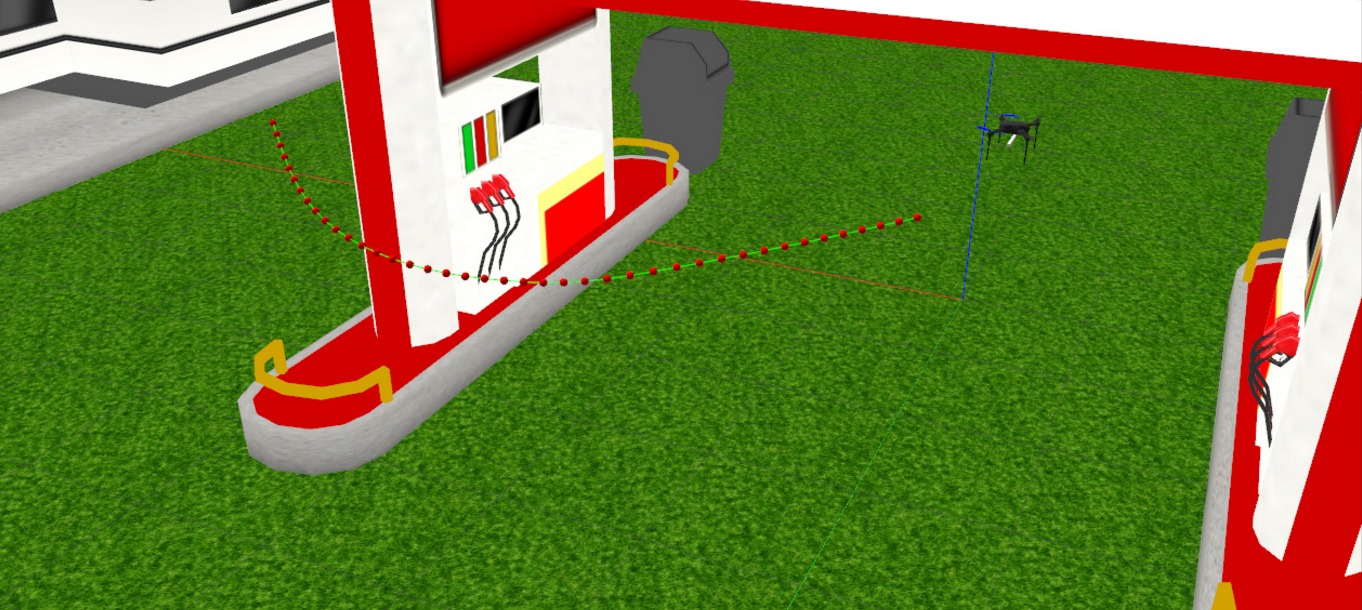
Path planning using Informed RRT*
- Tools: OMPL, FCL, Octomap, ROS, Gazebo, OpenCV
- Obtained a multi-objective optimized path for UAV using OMPL & FCL for collision detection in cluttered environment
- Autonomous 3D occupancy (Octomap) and collision avoidance was developed and tested on Ardupilot SITL Gazebo
- Used cheap stereoscopic camera instead of lidar reducing the cost by 90%, where point cloud was created using OpenCV
Modern legged bio-inspired jumping robot
- Tools: Python
- Explored the design and control of a quasi direct-drive legged robot, developed hands-on skills in experimental robotics, mechanical design, and python
- Derived the forward and inverse kinematics, developed python code to control leg pesition and execute PID and time-optimal moves
- Explored the effect of different leg designs (size/shape, with/without series-elasticity, gearing effects)

Autonomous stair-climbing Robot
- Tools: EEG, ROS, Raspberry Pi
- Recipient of the Gold medal in the intra-collegiate hardware exhibition 2017 at IIT Kharagpur
- Computer vision based target following for navigation was achieved using Kanade-Lucas tracking of Shi Tomasi corners
- Developed EEG signal based control, voice control using CMUSphinx along with a touch interface using Raspberry Pi
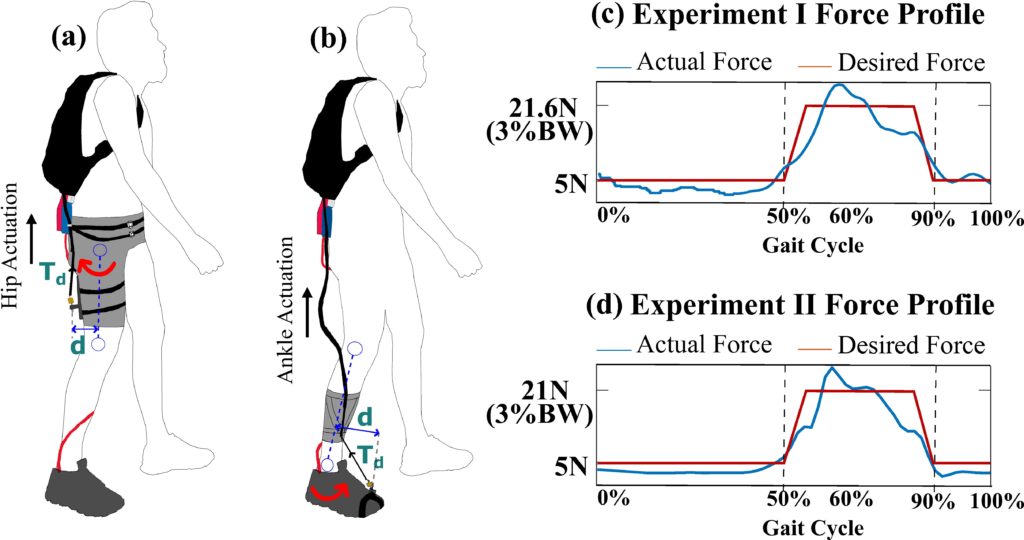
Improving the therapeutic outcome of the recuperation process of disabled patients
SLAM that creates semantically meaningful maps by combining geometric and semantic information
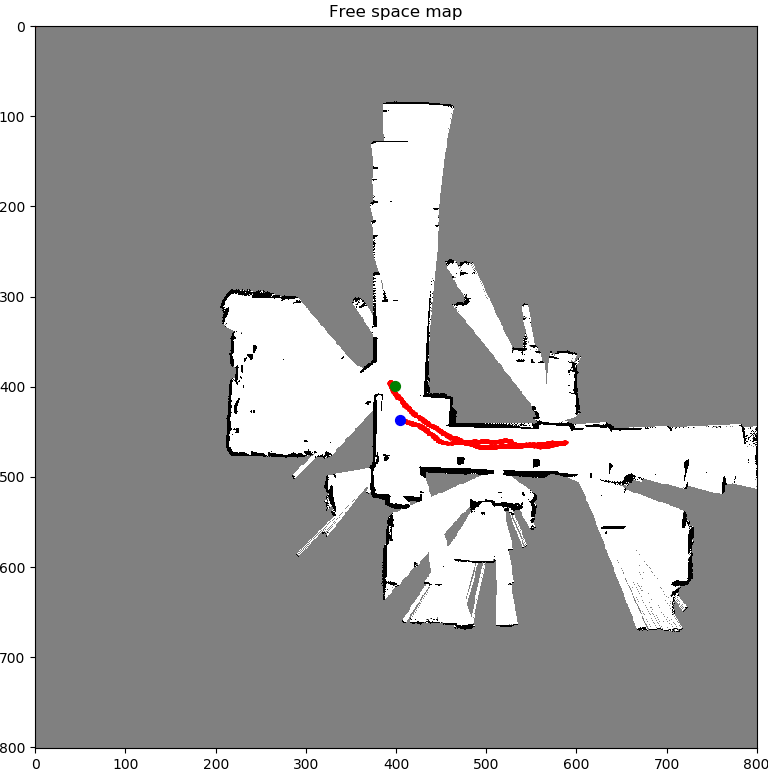
A solution for SLAM based on particle filter and occupancy grid
- Tools: Python, OpenCV
- The solution is evaluated with real-world odometry data, indoor 2-D laser scans, and RGBD measurements from THOR, a humanoid robot with lidar and Kinect v2 installed
- Texture mapping, wherein color points from the RGBD sensor are projected onto the occupancy grid in order to color the floor
- It is able to estimate reliable map and robot trajectory on various dataset in reasonable time
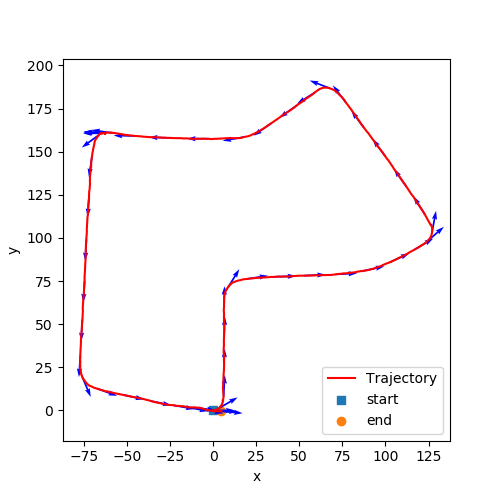
Visual-inertial simultaneous localization and mapping (SLAM) using the Extended Kalman Filter
- Tools: Python, OpenCV
- EKF equations are used with a prediction step based on SE(3) kinematics and an update step based on the stereo camera observation model to perform localization and mapping.
- The proposed solution is evaluated with real-world measurements from an IMU and a stereo camera installed in a car.
- It can estimate reliable maps and trajectory on various datasets in a reasonable time.


Detect stop signs with small amount of false positives.
- Tools: Python, OpenCV
- A classifier that will segement the image into two parts - red and not red using Gaussian Discriminative Model
- A detector which detects if the red part has any STOP signs based on contour
- If a STOP sign is detected, it creates a bounding box around the STOP sign and return its co-ordinates in pixels

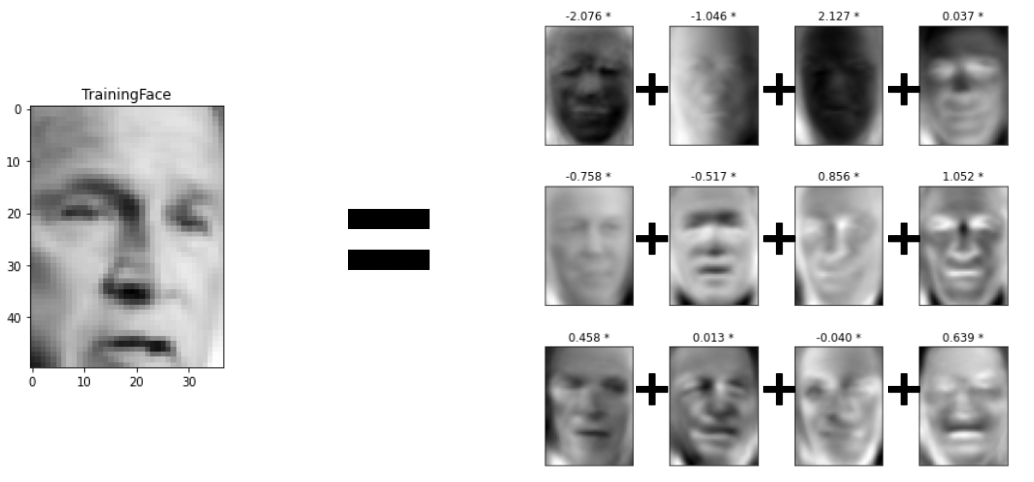
Face Recognition using Principal Component Analysis (PCA)
- Tools: Python
- Principal component analysis (PCA) is used on a collection of face images to form a set of basis features.
- Face images are projected onto a feature space ('face space') that best encodes the variation among known face images
- The face space is defined by the 'eigenfaces', which are the eigenvectors of the set of faces; they do not necessarily correspond to isolated features such as eyes, ears, and noses
Publications
Siddhartha Jha, Himanshu Chaudhary, ... Saurabh Mirani
Proceedings of the 2018 4th International Conference on Mechatronics and Robotics Engineering
Teaching
- UC San Diego
- Grad TA - PSYC 60, Introduction to Statistics (Spring 2021)
- Grad TA - CSS 1, Introductory Programming for Computational Social Science (Winter 2021)
- Grad TA - PSYC 60, Introduction to Statistics (Fall 2020)
- Reader - MAE 30B, Dynamics and Vibrations (Spring 2020)
- IIT Kharagpur
- UG TA - ME22002, Thermodynamics (Spring 2019)
- Mentor
- ROS Workshop (UC San Diego, Winter 2021)
- Autonomous Robotics Workshop by IEEE (IIT Kharagpur, Fall 2016)
Skills
Languages and Softwares
 C++11
C++11
 MATLAB
MATLAB
 Simulink
Simulink
 ROS
ROS
 Gazebo
Gazebo
 RViz
RViz
 Proteus
Proteus
 SolidWorks
SolidWorks
 Eagle
Eagle
Python Libraries
 SciPy
SciPy
 Gym
Gym
 CasADi
CasADi
 OSQP
OSQP
 PyBullet
PyBullet
C++ Libraries
 Eigen
Eigen
 Boost
Boost
 Taskflow
Taskflow
 Fast DDS
Fast DDS
 TinyXML-2
TinyXML-2
 PCL
Bullet
PCL
Bullet
 OMPL
OMPL
 OctoMap
OctoMap
 FCL
FCL
 MoveIt
MoveIt
Other
 Git
Git
 AVR
AVR
 STM ARM
STM ARM
 Raspberry Pi
Raspberry Pi
 BeagleBone
BeagleBone
 Arduino
Arduino
Operating Systems
 Linux
Linux
 Windows
Windows
Education
University of California San Diego
San Diego, United States
Degree: M.S. in Intelligent Systems, Robotics and Control
Department of Electrical and Computer Engineering
GPA: 3.87/4.0
- Planning & Learning in Robotics
- Sensing & Estimation in Robotics
- Statistical Learning
- Linear Algebra
- Bio-inspired robotics
- Introduction to Robotics
- Random Processes
- Linear Systems Theory
- Non-Linear Systems
Relevant Courseworks:
Indian Institute of Technology Kharagpur
Kharagpur, India
Degree: B.Tech (Hons.) in Mechanical Engineering
CGPA: 9.36/10
- Intelligent Machines & Systems
- Robots and Robotics
- Soft Computing
- Probability and Statistics
- Embedded Systems
- Design and Analysis of Algorithms
- Robots and Computer Controlled Machines
- Systems and Control
- Neuro-Fuzzy Control
Relevant Courseworks: